當前位置: 首頁 > 工業控制產品 > 運動控制 > 工業機器人 > 直角坐標型工業機器人
發布日期:2022-04-18 點擊率:107
2016年是機器人行業飛速發展的一年,從猴年央視春節晚會上的機器人舞蹈到現在遍地開花的各大機器人操作系統、控制系統企業,從全國各地的機器人大會、機器人論壇到機器人與互聯網運營、大數據等新興技術的結合,機器人早已經不是我們傳統意義上重復性重體力勞動的人工替代品,而是越發智能與常見。越來越多的機器人進入尋常企業,而對于這些企業來講,機器人控制系統的性能如何,是他們關注的重點。
就目前來講,業界尚沒有專門針對工業機器人控制系統的性能測試標準,在機器人行業,提到性能規范,一般是針對整機而言。評價工業機器人整機性能的指標有很多,基于不同的的設計目的以及用途,其整機配件搭配、結構設計以及參數調整也有所差異,控制系統只是其中的一個環節,發動機(伺服電機)、變速箱(減速器)、底盤/懸掛(結構件)等對機器人整體的性能都有很大的影響。
國標《GB/T 12642 - 2001 工業機器人性能規范及其試驗方法 》中針對十幾種機器人的性能指標進行界定,其中經常提到的有三種:重復定位精度、位姿精度、軌跡精度。
一般來說,工業機器人控制系統的性能可以由機器人的位姿精度和軌跡精度來間接表示。
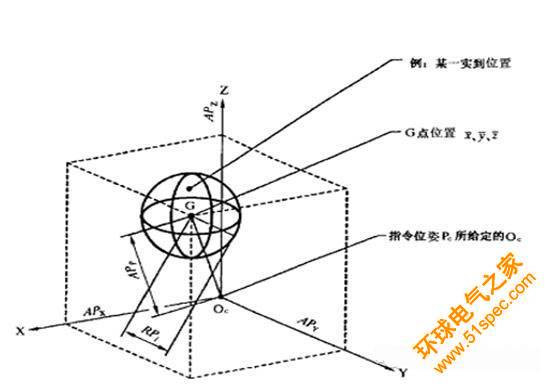
1、位姿精度(Pose Accuracy):
機器人的位姿精度一般指位姿重復度。
機器人的位姿是指機器人相對于某一參考坐標系的位姿,其重復位姿精度是機器人的一項最重要的技術指標,該指標集中反映機器人的機電性能和使用效果,即機器人對同一指令位姿從同一方向重復響應n次后實到位姿的一致程度。一般采用激光跟蹤儀進行位姿精度的測量,如下圖所示:
想要達到較高的位姿精度,需要控制系統提供以下功能:
補償機械連桿的運動學參數誤差,如連桿加工誤差、裝配誤差、機械公差等;
補償關節柔性及連桿柔性;
提供高精度的機械零點標定功能。
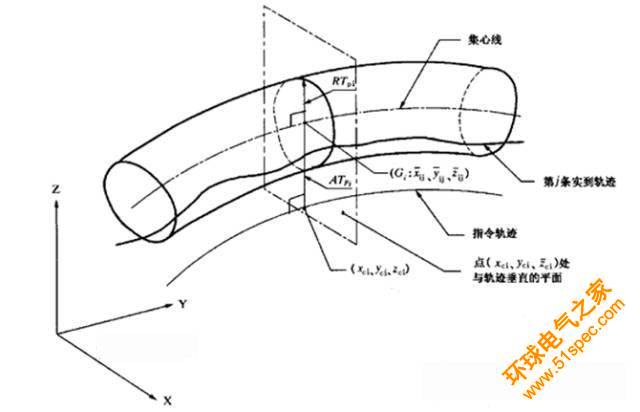
2、軌跡精度(Path Accuracy):
機器人的軌跡精度,一般是指軌跡重復精度,表示機器人對同一軌跡指令重復n次時實到軌跡的一致程度。一般采用激光跟蹤儀進行測試,讓機器人重復走某一條軌跡n次,然后取由n條軌跡組成的軌跡條橫切面的半徑。如下圖所示:
一般采用模型的控制(Model based Control)來提高軌跡精度。ABB公司對其Quick Move和True Move進行了對比演示,在使用模型控制后,可保證機器人在系統允許的任何速度下保持非常高的軌跡一致性。
另外,想要達到較高的軌跡精度,對機器人進行關節摩擦補償也十分必要。
下一篇: PLC、DCS、FCS三大控
上一篇: 索爾維全系列Solef?PV


